رباتها برای عملکرد یکپارچه و مؤثر، به اطلاعات گستردهای در مورد محیط خود نیاز دارند. این اطلاعات توسط حسگرهای مختلفی جمعآوری میشود که به ربات اجازه میدهد محیط اطراف خود را ببیند، احساس کند و درک کند. حسگرهای سهبعدی در رباتیک از جمله حسگرهای جدید و کمهزینهای هستند که برای رباتها در دسترس قرار گرفتهاند و درک سهبعدی غنی از محیط خود را فراهم میکنند و به رباتها مانند ربات جوشکاری اجازه میدهند «خودآگاه» باشند.
در طول دهه گذشته، حسگرهای سهبعدی به سرعت توسعه یافتهاند و اکنون در کاربردهای مختلفی مورد استفاده قرار میگیرند. آنها به یکی از متنوعترین و فراگیرترین انواع حسگرها تبدیل شدهاند که کاربردهای بیشماری در رباتیک پیدا کردهاند - از ایجاد نقشه، مونتاژ و بازرسی ترکیبی، بازرسی سطح و جسم گرفته تا تشخیص جسم و جلوگیری از برخورد.
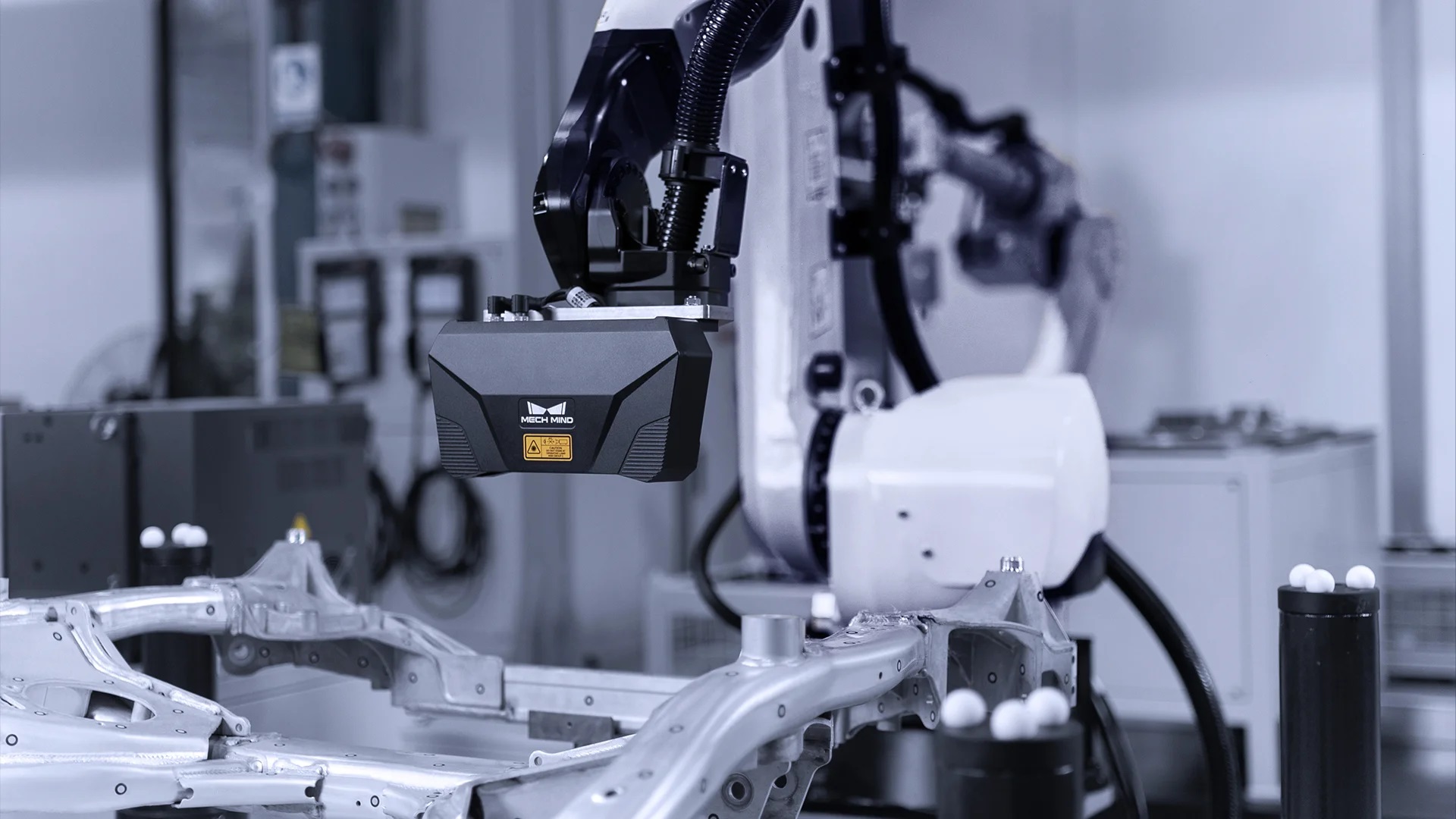
پیشرفتهای تکنولوژیکی منجر به دوربینهای حسگر سهبعدی کوچکتر، دقیقتر و با قابلیت پیکربندی آسان شده است که دقت و قابلیت اطمینان رباتیک را به طرز چشمگیری افزایش دادهاند.
در این گردآوری، انواع مختلف حسگرهای سهبعدی، نحوهی عملکرد آنها و برخی از کاربردهای کلیدی حسگرهای سهبعدی در رباتیک را مورد بحث قرار خواهیم داد.
یک حسگر سهبعدی، دستگاهی برای سنجش عمق است که میتواند فاصله یا جهت یک جسم را در سه بعد اندازهگیری کند. سه محور اندازهگیری معمولاً محورهای x، y و z هستند که به ترتیب با جهتهای چپ-راست، جلو-عقب و بالا-پایین مطابقت دارند. در حالت ایدهآل، فناوری سهبعدی از سیستم بینایی انسان تقلید میکند که جهان را در سه بعد درک میکند.
حسگرهای سهبعدی را میتوان بر اساس نحوه اندازهگیری فاصله به دو دسته فعال و غیرفعال طبقهبندی کرد. حسگرهای سهبعدی فعال از انتشار و تشخیص انرژی ساختاریافته، مانند لیزر، برای اندازهگیری فاصله استفاده میکنند.
از سوی دیگر، حسگرهای غیرفعال با تجزیه و تحلیل نور منعکس شده یا امواج رادیویی، فاصله تا یک جسم را اندازهگیری میکنند. حسگرهای غیرفعال از اصل مثلثبندی برای بازیابی اطلاعات عمق و محاسبه فاصله بین جسم و حسگر استفاده میکنند.
حسگرهای سهبعدی از روشهای مختلفی برای اندازهگیری فاصله استفاده میکنند. حسگرهای فعال که در ربات پالتایزر محبوب هستند، نور ساختاریافتهای را به شکل لیزر یا تابش مادون قرمز منتشر میکنند و سپس زمان بازگشت نور به حسگر را اندازهگیری میکنند.
از سوی دیگر، حسگرهای غیرفعال از نور منعکس شده یا امواج رادیویی برای اندازهگیری فاصله استفاده میکنند. این حسگرها معمولاً دارای یک فرستنده و گیرنده هستند که با فاصله مشخصی از هم جدا شدهاند. سپس فاصله با اندازهگیری زمان طی شدن سیگنال بین دو دستگاه و سپس بازگشت به گیرنده محاسبه میشود.
برای اینکه به وضوح نحوه کار یک حسگر سهبعدی را درک کنید، بیایید نگاهی به نمونهای از یک حسگر سهبعدی فعال، یعنی فاصلهیاب فراصوت، بیندازیم.
یک فاصلهیاب فراصوت، موجهای صوتی فراصوت را منتشر میکند و سپس زمان بازگشت امواج صوتی به حسگر را اندازهگیری میکند. اختلاف زمانی بین انتشار امواج صوتی و بازگشت آنها برای محاسبهی فاصله تا جسم استفاده میشود.
سپس فاصله به یک مقدار دیجیتال تبدیل میشود که توسط میکروکنترلر حسگر سهبعدی پردازش میشود. دادههای پردازششده سپس به عنوان یک سیگنال الکتریکی خروجی داده میشوند که میتواند برای ایجاد یک تصویر سهبعدی از جسم استفاده شود.
انواع مختلفی از حسگرهای سهبعدی وجود دارد که در کاربردهای متنوعی مورد استفاده قرار میگیرند. عوامل اصلی تعیینکننده انتخاب حسگر سهبعدی شامل عملکرد حسگر، محدودیتهای محیطی و تأثیر بر میزبان است. در اینجا برخی از رایجترین انواع حسگرهای سهبعدی در بازار امروز آورده شده است:
سنسورهای سه بعدی استریو رایجترین نوع سنسورهای سه بعدی هستند. این سنسورها ارزان هستند و عملکرد کلی بسیار خوبی دارند.
حسگرهای استریو سهبعدی معمولاً از دو دوربین تشکیل شدهاند که در فاصله ثابتی از هم قرار گرفتهاند. دوربینها با تجزیه و تحلیل تفاوتهای تصاویر گرفته شده توسط دو دوربین، فاصله تا هر جسم را اندازهگیری میکنند. حسگرهای استریو سهبعدی میتوانند فعال یا غیرفعال باشند و برای بازرسی سطح، تشخیص جسم و نقشهبرداری استفاده میشوند.
حسگرهای نور ساختاریافته از لیزر یا تابش مادون قرمز برای تاباندن الگویی شناختهشده مانند مربع، نقطه یا خط بر روی سطح یک جسم استفاده میکنند. سپس حسگر، اعوجاج الگوی ایجاد شده توسط جسم را اندازهگیری میکند.
در مرحله بعد، حسگر از اصل مثلثبندی برای محاسبه عمق و فاصله جسم بر اساس اعوجاج الگو استفاده میکند.
حسگرهای سهبعدی نور ساختاریافته معمولاً برای کاربردهای صنعتی مانند بازرسی سطح، تشخیص اشیا، کنترل کیفیت، چاپ سهبعدی، اسکن و اندازهگیری استفاده میشوند.
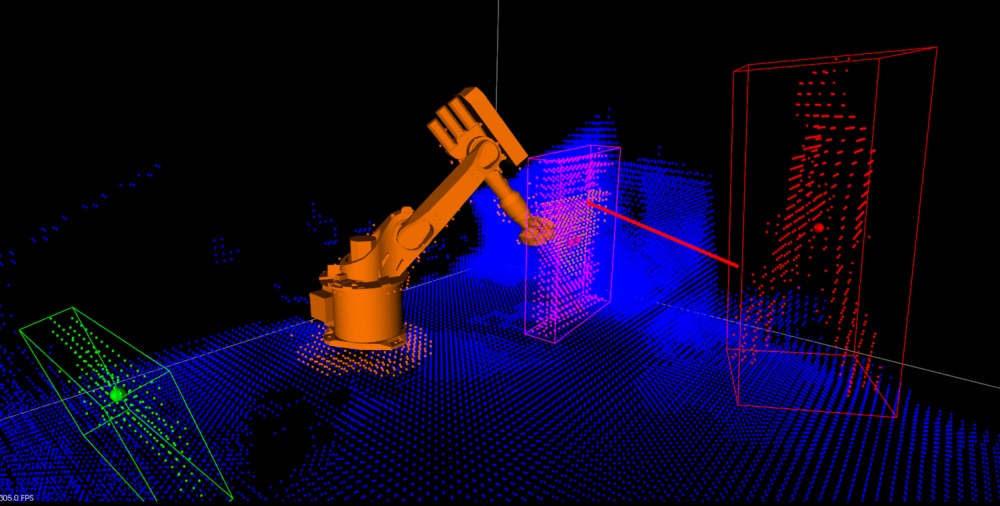
حسگرهای زمان پرواز نوعی حسگر LiDAR (تشخیص و فاصلهیابی نور) هستند که برای اندازهگیری فاصله استفاده میشوند. حسگرهای ToF دقیقترین نوع حسگر سهبعدی هستند. این حسگرها از لیزر برای انتشار نور استفاده میکنند تا بر اساس واریانسهای نوری قابل اندازهگیری، تفاوت در عمق جسم را مشخص کنند.
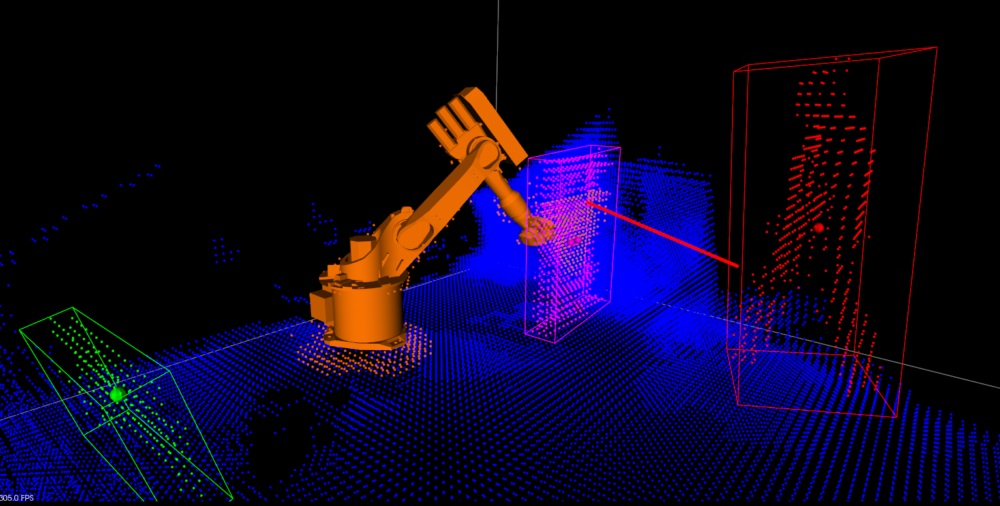
آنها از تکنیکی به نام تشخیص پالس-اکو برای اندازهگیری فاصله و عمق یک جسم استفاده میکنند. ToF یک ابر نقطهای سهبعدی از مختصات X، Y، Z ایجاد میکند تا بر اساس اختلاف زمانی بین انتشار نور و بازتاب آن به حسگر، جسم را نقشهبرداری کند.
حسگرهای ToF معمولاً در کاربردهای صنعتی و پزشکی مانند بینایی ماشین، اسکن سهبعدی، ردیابی حرکت، ناوبری داخلی، تشخیص ژست و شناسایی بیومتریک استفاده میشوند.
با ظهور فناوریهای جدید و نوآورانه، استفاده از حسگرها برای رباتها دائماً در حال افزایش است. برخی از رایجترین کاربردهای حسگرهای سهبعدی در رباتیک در زیر مورد بحث قرار گرفته است.
حسگرهای سهبعدی در سیستمهای ناوبری برای کمک به رباتها در مکانیابی و ردیابی موقعیت خود نسبت به محیط اطرافشان استفاده میشوند. حسگرهای سهبعدی برای محاسبه فاصله بین ربات و محیط اطرافش استفاده میشوند که سپس برای ایجاد نقشهای از محیط استفاده میشود و به آنها در ناوبری و تشخیص موانع کمک میکند.
حسگرهای سهبعدی همچنین در سیستمهای ردیابی حرکت برای ردیابی حرکت رباتها و سایر اشیاء نسبت به یکدیگر استفاده میشوند. این امر به کنترل حرکت رباتها و اطمینان از همکاری یکپارچه و همگام بودن آنها با یکدیگر کمک میکند.
حسگرهای سهبعدی همچنین برای تشخیص اشیا استفاده میشوند، که فرآیند شناسایی و مکانیابی اشیا در محدوده آنهاست. رباتها از این برای شناسایی و ردیابی اشیا در محیط خود استفاده میکنند که میتواند برای کارهایی مانند جلوگیری از برخورد یا برداشتن اشیا مورد استفاده قرار گیرد.

در کاربردهای تولیدی، توزیع و اجرا، از حسگرهای سهبعدی در سیستمهای پالتبندی و جداسازی از پالت نیز برای شناسایی و مکانیابی اشیاء استفاده میشود. پالتبندی فرآیند برداشتن اشیاء از پالت است در حالی که پالتبندی فرآیند قرار دادن اشیاء روی پالت است.
حسگرهای سهبعدی برای ایجاد یک مدل سهبعدی از یک شیء با استفاده از نیمرخ آن استفاده میشوند. این به ربات کمک میکند تا شکل شیء را درک کند و بهترین راه برای قرار دادن آن روی پالت برای ذخیرهسازی و حمل و نقل را تعیین کند.
استفاده از حسگرهای سهبعدی در صنایع و کاربردهای مختلف به طور فزایندهای رایج میشود و استفاده از آنها در رباتیک نیز از این قاعده مستثنی نیست. حسگرهای سهبعدی طیف گستردهای از مزایا را ارائه میدهند که میتوانند عملکرد و کارایی رباتها را بهبود بخشند. برخی از مزایای کلیدی عبارتند از:
موجب صرفه جویی در زمان و هزینه می شود: حسگرهای سه بعدی به خودکارسازی فرآیندها و بهبود دقت کمک می کنند که می تواند منجر به عملیات سریعتر و کارآمدتر شود.
بهبود ایمنی: استفاده از حسگرهای سهبعدی در رباتیک همچنین میتواند با کمک به جلوگیری از برخورد و تصادف، ایمنی را افزایش دهد.
عملکرد بهبود یافته: حسگرهای سهبعدی میتوانند به رباتها کمک کنند تا در محیطهای دشوار یا خطرناک، مانند محیطهای تاریک، گرم، پرگردوغبار یا مرطوب، عملکرد بهتری داشته باشند.
انعطاف پذیری بیشتر: حسگرهای سه بعدی به ربات ها اجازه می دهند در مناطقی که برای حسگرهای سنتی قابل دسترسی نیستند، حرکت و فعالیت کنند.
ادغام آسانتر: حسگرهای سهبعدی راحتتر در رباتها ادغام میشوند و راهاندازی و کار با آنها را سادهتر و سریعتر میکنند.
هزینه کمتر: حسگرهای سهبعدی به طور فزایندهای مقرون به صرفهتر میشوند و این امر آنها را به گزینهای اقتصادی برای بسیاری از کاربردها تبدیل میکند.
افزایش دقت: حسگرهای سهبعدی دقت بیشتری نسبت به حسگرهای سنتی ارائه میدهند و کیفیت و دقت وظایف انجام شده توسط رباتها را بهبود میبخشند.

حسگرهای سهبعدی با گسترش آگاهی مکانی و فرآیندهای تصمیمگیری، قابلیتهای سیستمهای رباتیک را به طور قابل توجهی افزایش میدهند.
با حسگرهای سهبعدی، رباتها به سطح پیشرفتهای از درک بصری دست مییابند که امکان تعامل بهتر با محیطهای پیچیده و دستکاری دقیق اشیاء را فراهم میکند.
دادههای بلادرنگ ارائه شده توسط حسگرهای سهبعدی، امکان پاسخهای سریعتر و دقیقتر را فراهم میکند که برای کاربردهایی در صنایعی مانند لجستیک و عملیات نجات ضروری است.
با وجود مزایای آنها، حسگرهای سهبعدی با چالشهای خاصی روبرو هستند که برای به حداکثر رساندن پتانسیل آنها در رباتیک باید مورد توجه قرار گیرند.
مسائلی مانند تداخل نور خارجی، محدودیتهای برد حسگر و محدودیتهای توان پردازش میتوانند در برخی تنظیمات بر اثربخشی حسگرهای سهبعدی تأثیر بگذارند.
حسگرهای سهبعدی میتوانند گران باشند و مقیاسپذیری آنها برای صنایعی که نیاز به استقرار انبوه سیستمهای رباتیک دارند، چالشبرانگیز است.
با پیشرفتهایی که در هوش مصنوعی، یادگیری ماشین و فناوریهای جدید حسگر حاصل شده است، آینده حسگرهای سهبعدی در رباتیک امیدوارکننده به نظر میرسد.
هوش مصنوعی و یادگیری ماشینی با فراهم کردن امکان پردازش دقیقتر دادهها، تشخیص اشیا و تفسیر محیطی، قابلیتهای حسگرهای سهبعدی را افزایش میدهند.
فناوریهای حسگر جدید، مانند لیدار و نور ساختاریافته پیشرفته، مرزهای دستاوردهای حسگرهای سهبعدی در رباتیک را جابهجا میکنند.
حسگرهای سهبعدی در حال تغییر چشمانداز رباتیک هستند و رباتها را سازگارتر، توانمندتر و کارآمدتر میکنند. با پیشرفتهای مداوم در هوش مصنوعی و فناوری حسگر، پتانسیل حسگرهای سهبعدی در رباتیک بیحد و مرز است و راه را برای راهحلهای رباتیک ایمنتر و نوآورانهتر در صنایع هموار میکند.
حسگرهای سهبعدی با ایجاد امکان ساخت رباتهایی که میتوانند با محیط خود به شیوهای طبیعیتر و شهودیتر تعامل داشته باشند، انقلابی در رباتیک ایجاد میکنند. این حسگرها به ایجاد رباتهای هوشمندتر و همهکارهتر کمک میکنند که میتوانند برای اهداف مختلفی مانند ناوبری، تشخیص اشیا، ردیابی حرکت، امنیت و نظارت و کاربردهای پزشکی و موارد دیگر مورد استفاده قرار گیرند.
فناوری حسگر سهبعدی دائماً در حال تکامل و پیچیدهتر شدن است، که مطمئناً راه را برای کاربردهای نوآورانهتر در آینده هموار میکند. تاکنون، حسگرهای سهبعدی پتانسیل عظیمی را در رباتیک نشان دادهاند و پیشرفتهای منحصر به فردی را در نحوه درک و رویکرد فعالیتهای روزمره ارائه دادهاند. هیجانانگیز خواهد بود که ببینیم آینده برای حسگرهای سهبعدی و رباتیک چه چیزی را در بر دارد.




24 تیر 1404

25 تیر 1404

26 تیر 1404
29 تیر 1404

31 تیر 1404

02 مرداد 1404

17 مرداد 1404

20 تیر 1405

21 تیر 1405

21 تیر 1405

19 مرداد 1404

27 مرداد 1404

04 اسفند 1404
04 اسفند 1404

04 اسفند 1404

09 آبان 1403

17 تیر 1405

17 تیر 1405
مشاهده بیشتر

21 تیر 1405

22 تیر 1405
22 تیر 1405

22 تیر 1405

25 تیر 1405
28 تیر 1405

30 تیر 1405

30 تیر 1405

31 تیر 1405

30 تیر 1405

30 تیر 1405

30 تیر 1405

01 مرداد 1405

02 مرداد 1405

23 تیر 1404
23 تیر 1404

23 تیر 1404

24 تیر 1404